Micro-Cameras for Rosetta Lander
MCSE team has developed, for the French “Institut d’Astrophysique Spatiale IAS-INSU” the micro-cameras of the Civa instrument, adapted to comet surface exploration.
Rosetta Mission facts and figures
ESA Mission
Launch: 2 March 2004
Arrival on the comet: 12 November 2014
Orbiter: 11 scientific instruments
Lander: 100 kg, 9 scientific instruments
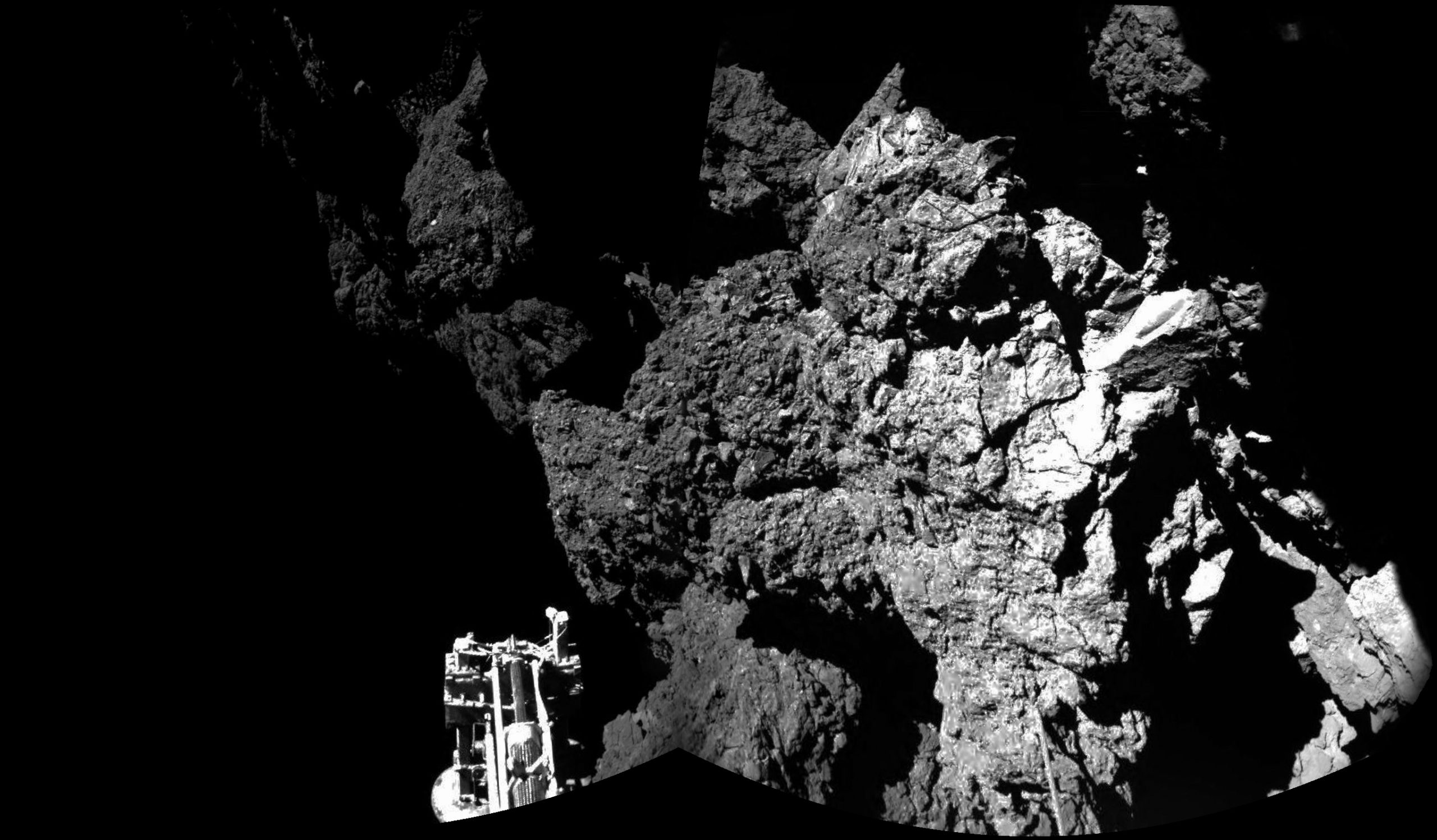
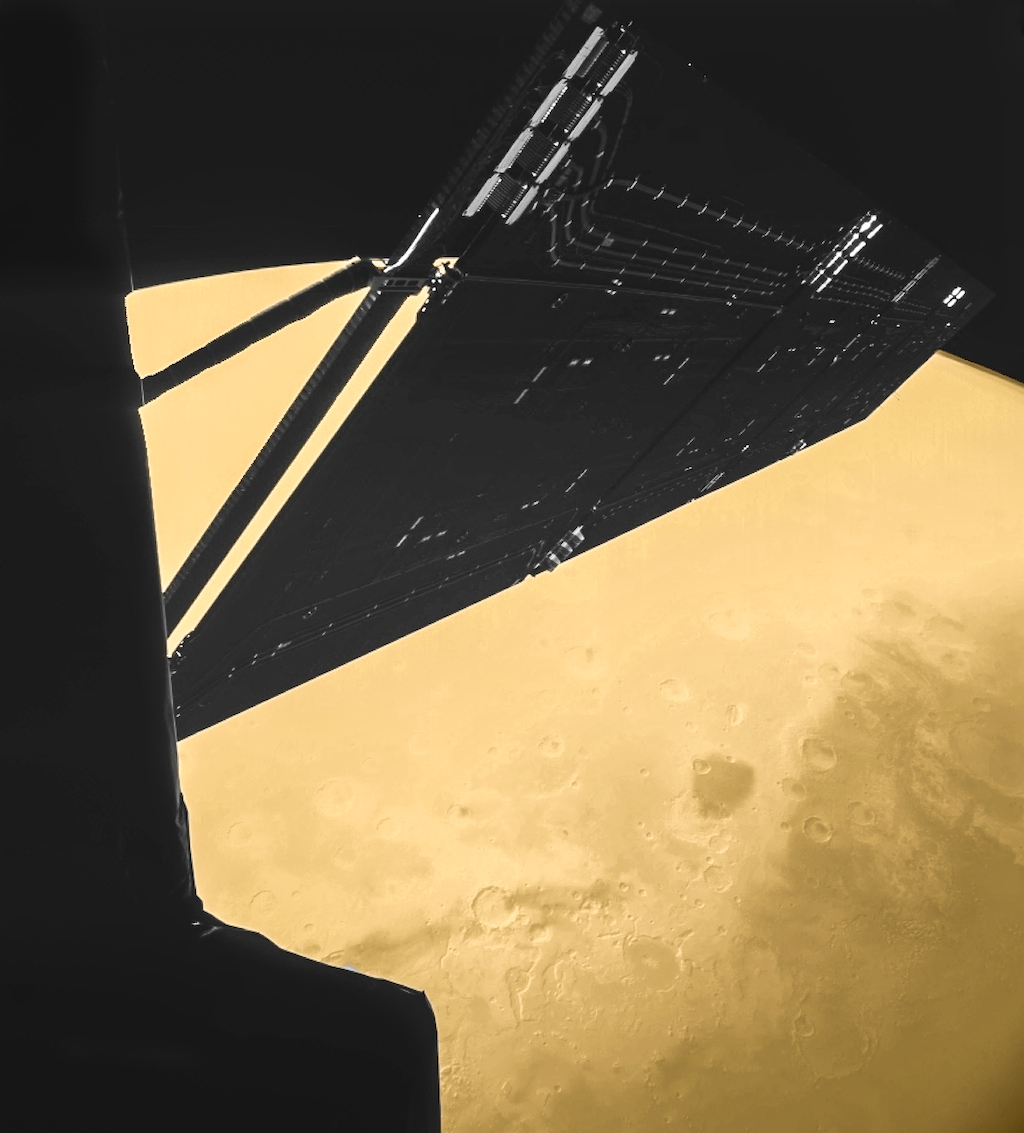
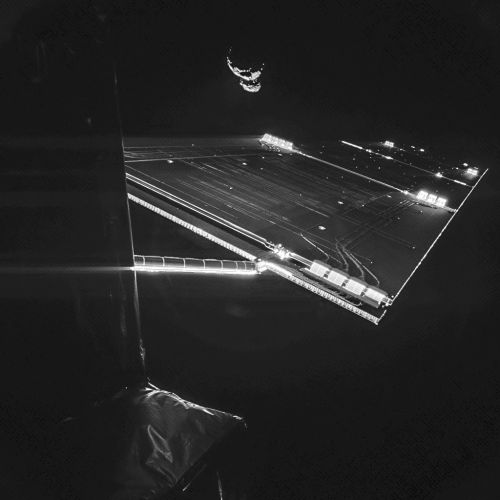
Goal: long-term exploration of Comet 67P/Churyumov-Gerasimenko
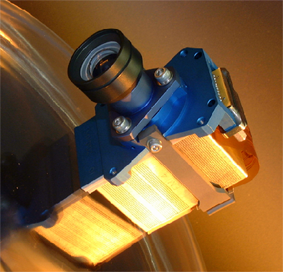
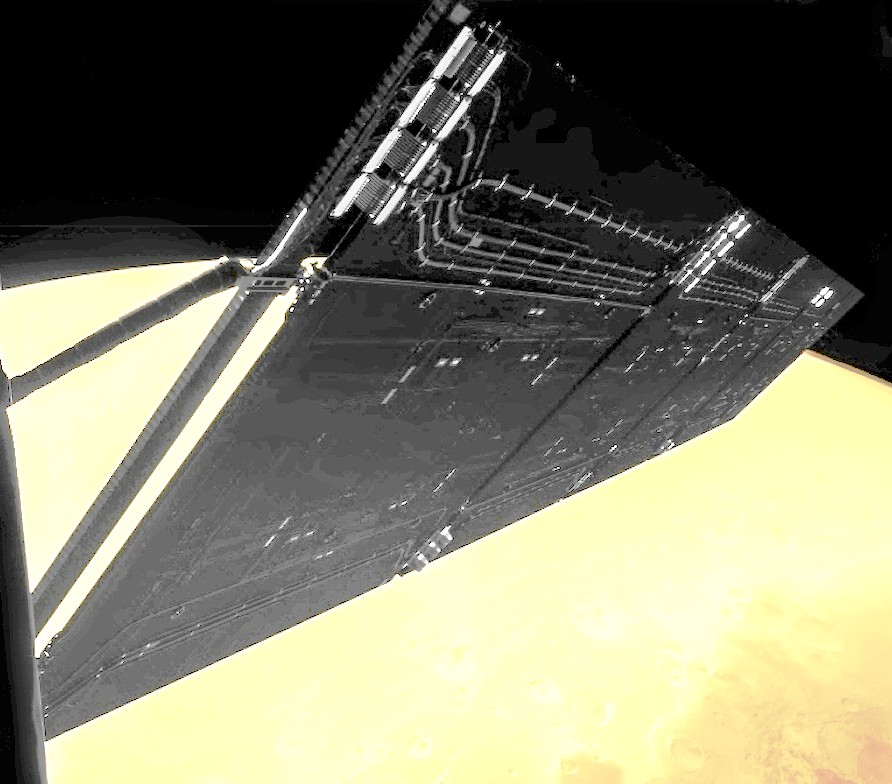
The panoramic camera of the Rosetta lander is a lightweight imaging system designed to characterise the cometary surface near the landing site, from anchoring legs at spatial scales not achievable by the orbiter cameras, to the local horizon.
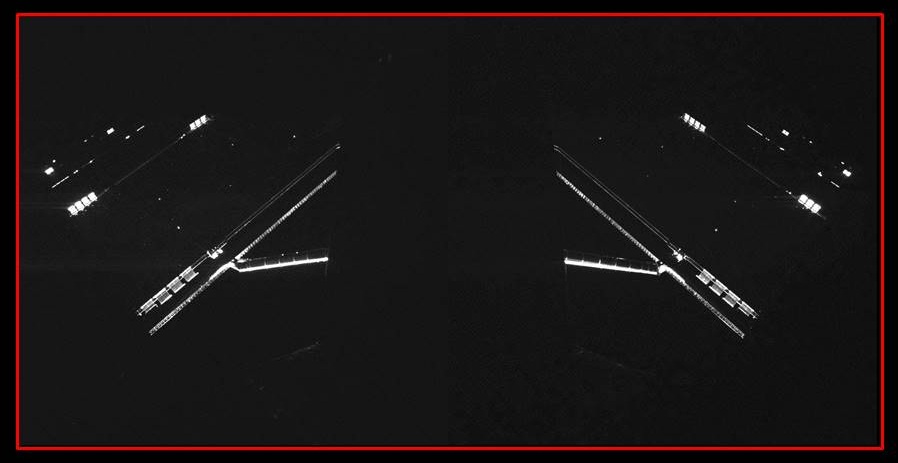
It is composed of seven miniaturised identical cameras incorporating a 1024×1024 pixels, frame transfer CCD and wide-angle optics having a field-of-view of 70°. Six of them are equally spaced by 60° to record the full panorama without mechanical rotation. The seventh camera is co-aligned with one of the above to offer stereoscopic capability in one of the six fields-of-views.
These micro-cameras must survive a long cruise in interplanetary space and operate in the very hostile environment of a cometary surface where temperatures will vary from -110°C to -50°C. To validate the technology for this extreme environment conditions, successful thermal testing, including thermal cycles, has been performed on these micro-cameras.

Relevant publications
S. Beauvivre, P. Lamy, T. Nguyen-Trong, and J.-L. Reynaud, The Panoramic Camera of the Rosetta Mission: Performances of Prototype 3D Microcameras, Adv. Space Res. 24 (9), 1105-1114 (1999).
S. Beauvivre, Results of tests performed on prototypes of micro-cameras, 3D Interconnect Working Group Meeting, ESA/ESTEC, Noordwijk, The Netherlands, Feb. 1999.